现代机器人和蹒跚学步的孩子没什么不同:看着它们摔倒很好笑,但我们知道,如果我们笑得太厉害,它们可能会演变出一种奇怪的东西,从而有可能引发第三次世界大战。没有一个人类的创造物,能够像机器人这样令人困惑、敬畏、钦佩和恐惧:我们希望机器人能让我们的生活变得更轻松、更安全,但我们不能完全相信它们。我们正在按照自己的形象设计它们,但我们担心它们会取代我们。
不过,这种犹豫不决,并不妨碍机器人技术的蓬勃发展。机器人终于变得足够聪明,有足够的体力走出工厂和实验室,在我们中间行走、奔跑甚至跳跃。机器人已经到了。
你可能担心机器人会抢走你的工作。毕竟,这是资本主义,自动化是不可避免的。但在不久的将来,你更可能和一个机器人一起工作,而不是让一个机器人取代你。更好的消息是:你更可能和机器人交朋友,而不是让一个机器人来杀掉你。
机器人的历史
“机器人”的定义从一开始就令人困惑。这个词最早出现在1921年卡雷尔·卡佩克(Karel Capek)的剧作《R.U.R.》(全称为《Rossum's Universal Robots》)里。“机器人”来自捷克语,意思是“强迫劳动”。不过,这些机器人更像是精神上的机器人而不是形式上的机器人。它们看起来像人类,不是由金属制成,而是由化学品制成的。机器人远比同样的人类更有效率,而且更具谋杀性——它们最终会大开杀戒。
《R.U.R.》将建立不可信任的机器的比喻一直持续到今天。例如,《终结者》(Terminator)、《复制娇妻》(The Stepford Wives)、《银翼杀手》(Blade Runner)等等。这并不是说流行文化没有拥抱更友好的机器人。想想《The Jetsons》中的罗西(Rosie)吧。而且,没有一个作品能够比罗宾·威廉姆斯(Robin Williams)的《Bicentennial Man》更家庭友好了。
现实中“机器人”的定义和那些虚构作品中的一样不可靠。如果你问10个机器人专家,你会得到10个不同的答案。但他们确实在一些一般性的指导方针上达成了一致:机器人是一个智能的、物理体现的机器。机器人可以自主地执行任务。机器人可以感知环境,并进行相应的操作。
你操纵的在周围飞行的无人机,并不是机器人。但是给无人机自主起飞和着陆的能力,并能够感知周围的物体,它就变得更像机器人了。关键是智能、感知和自主。
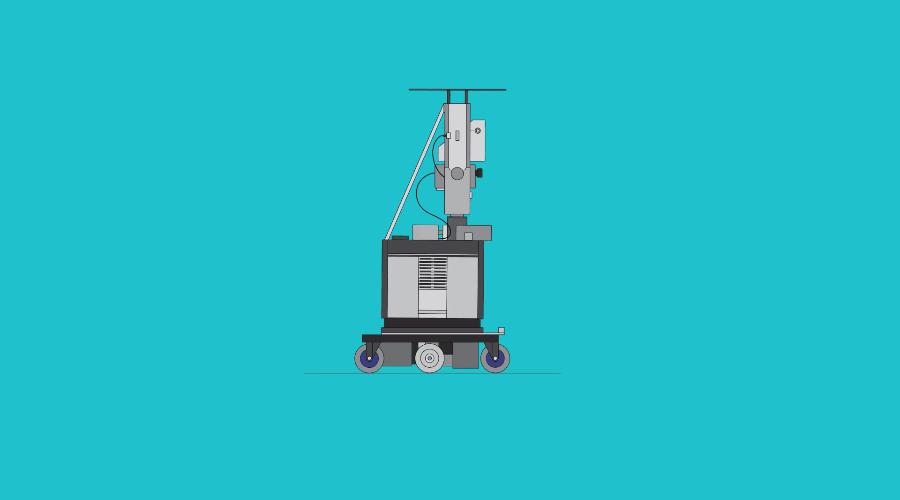
但直到20世纪60年代,才有公司开始开发符合这些准则的产品。就在那时,硅谷的SRI International开发出了Shakey,这是第一个真正的移动感知机器人。这个“轮子上的塔”很有名——笨拙、缓慢、不停地颤抖。配备摄像头和保险杠传感器,Shakey可以在复杂的环境中导航。这不是一台看起来特别自信的机器,但它是机器人革命的开始。
大约在Shakey在浑身颤抖的时候,机器人臂开始改变制造方式。第一个是 Unimate,用来焊接汽车车身。如今,它的“后代”统治着汽车工厂,以比任何人都高得多的精度和速度完成繁琐、危险的任务。即使它们被固定在特定的位置,也仍然非常符合我们对机器人的定义——它们是能感知环境,并进行操作的智能机器。
然而,机器人仍然主要局限于工厂和实验室中,它们要么在那里滚来滚去,要么被卡在提升物体的地方。然后,在20世纪80年代中期,本田启动了一个人形机器人项目。它开发了P3,可以走得很好,还可以挥手和握手,这让人们很高兴。这项工作的高峰是著名的Asimo,它曾经和奥巴马一起踢过足球。
今天,先进的机器人无处不在。为此,你需要特别感谢三种技术:传感器、致动器和人工智能。
传感器。机器能在人行道上运送沙拉三明治,很大程度上要归功于2004年的DARPA(美国国防高级研究计划局的缩写)大挑战赛,在这个挑战中,机器人专家组成团队,拼凑出自动驾驶的汽车,来穿越沙漠。他们用激光雷达来建立世界的三维地图。随后私人公司开始竞相开发自动驾驶汽车,大大降低了激光雷达的价格,以至于工程师们可以用相对便宜的价格,制造出有感知能力的机器人。
激光雷达通常与机器视觉相结合——借助2D或3D摄像头,使机器人能够构建更好的图像。你知道Facebook是如何自动识别你的马克杯,并在照片中标记你的吗?与机器人的原理相同。奇特的算法可以自己挑选出来某些地标或物体。
传感器是阻止机器人把我们撞倒的关键所在。这就是为什么一个机器人可以盯着你,跟踪你,把你的东西拖来拖去;机器视觉还允许机器人扫描樱桃树以确定摇动樱桃树的最佳位置,从而帮助填补农业生产中巨大的劳动力缺口。
在每一个机器人中,都有一个秘密成分:致动器,这是一个奇特的词,指的是机器人关节中的电动机和变速箱的组合。正是这种致动器决定了机器人的强度,以及它移动的顺畅与否。没有致动器,机器人就会像布娃娃一样。即使是像Roombas这样相对简单的机器人,也要归功于致动器。自动驾驶汽车上也装满了这些东西。
致动器非常适合为汽车装配线上的大型机器人臂提供动力,但是一个新的领域,也就是所谓的软机器人,致力于创建一个全新水准的致动器。与骡型机器人不同的是,软机器人通常是柔软的,它们通过使用空气或者石油来使自己移动。与笨重的传统致动器不同,你可以叠放一堆这样的致动器来增强力量:例如,一个叫Kengoro的机器人,用116个致动器拉动缆绳,使机器能够做出像俯卧撑一样的人体动作。这是一种比传统的电动马达更自然的运动形式。
接下来是波士顿动力公司( Boston Dynamics ),该公司在2013年为DARPA机器人挑战赛创建了Atlas人形机器人。起初,大学机器人研究团队努力让机器完成2013年挑战和2015年总决赛的基本任务,比如转动阀门和开门。但从那时起,波士顿动力公司把Atlas变成了一个可以做后空翻的奇迹,远远超过了其他行走困难的两足机器人。(与终结者不同的是,它不带热量。)波士顿动力公司还在研制一种名为SpotMini的四足机器人,当人们踢或拉它时,它会迅速恢复。如果我们想建立一个我们不需要花掉所有时间帮助机器人摆脱困境的世界,这种稳定性将是关键。这都要归功于不起眼的致动器。
同时,Atlas和SpotMini这样的机器人身体越来越强壮,它们也越来越聪明,这多亏了人工智能。机器人技术似乎正到达一个转折点,在这个转折点上,处理能力和人工智能正在结合起来,使机器运转。对于机器来说,就像人类一样,感官和智能是分不开的——如果你拿起一个假苹果,在把它塞进嘴里之前没有意识到它是塑料的,你就不是很聪明。这是机器人学的一个前沿(复制触觉,而不是吃假苹果)。例如,一家名为SynTouch的公司,已经开发出了机器人指尖,可以感知从温度到粗糙程度的各种感觉。
随着传感器越来越便宜,人工智能所需的超级处理器也在经历同样的事情。得益于游戏和虚拟现实技术的进步,GPU正在帮助移动机器人直接在机器上执行复杂的计算,而不是在云中执行,这意味着如果失去连接,它们仍然可以运行。这对于机器视觉来说特别重要,机器视觉可以让Kuri这样的机器人识别你的脸。顺便帮你,而不是杀了你什么的。
理想的情况,就是这样的。
机器人的未来
越来越复杂的机器可能会充斥在我们的世界里,但要使机器人真正有用,它们必须变得能够更加自给自足。毕竟,要给一个家用机器人预先编程,使其掌握可能遇到的每一个物体的操作方法是不可能的。你要让它能够自己学习,这也是人工智能进步的地方。
拿机器人Brett来说。在加州大学伯克利分校的一个实验室里,这个人形机器人自学了如何去解决孩子们的一个谜题,在这个谜题中,你需要把不同形状的钉子塞进不同形状的孔中。它是通过一个叫做强化学习的过程,反复尝试来做到这一点的。没有人告诉它如何把方形的钉子塞进方形的洞中,Brett通过随机移动并获得数字奖励,每次它接近成功时,就能自己学到一些新的东西。当然,这个过程是非常缓慢的,但是随着时间的推移,机器人专家们将磨练机器在新环境中自学新技能的能力,如果我们不想被束缚在照看它们的工作中,这是至关重要的。
说到这个。在不久的将来,我们将不得不照看机器人。哪怕它们已经变得先进,但它们仍在艰难地应对着我们的世界。例如,它们会跳进喷泉里。因此,至少在短期内,解决办法是建立呼叫中心,机器人可以在紧急关头呼叫人类,来帮助它们度过难关。例如,如果医院的机器人晚上在大厅里行动,没有人来挪开一辆挡住它的前进的车,它就可以呼叫操作员。操作员将可以遥控机器人绕过障碍物。
人类与机器人之间迅速发展的关系非常复杂,以至于产生了一个独特的领域——人机交互。使机器人适应人类是很容易的——让它们变得柔软,给它们一种触觉——最大的挑战是训练人类与机器相处。以医院的机器人Tug来说,医生和护士得学会像对待祖父母一样对待它——让它不要碍事,必要时帮助它摆脱困境。我们还必须控制我们的期望:像Atlas这样的机器人看起来似乎很先进,但它们远非你想象中的那样具有很强的自主性。
人类所做的事情,基本上是发明了一种新的物种,现在我们可能有一点点懊悔。也就是说,如果机器人抢走了我们所有的工作怎么办?毕竟,即使是白领,也不能免受超人工智能的威胁。
很多聪明的人都在思考机器发展到足以使人类过时的奇点。这将导致大规模的社会重组和全物种的生存危机。如果我们不再需要工作,我们该怎么办?当工业生产用机器代替人工时,收入不平等会不会看起来比指数级更可怕?
这些问题看起来似乎很遥远,但现在是开始思考它们的时候了。你可能会认为,好莱坞这些年来给我们提供的杀手机器人故事有一些好处:目前,机器的能力可能有限,但作为一个社会,我们需要认真考虑我们要放弃多少权力。以旧金山为例,该市正在考虑征收机器人税的想法,这将迫使企业在解雇员工时支付工资。
我不能在这里向你们保证,机器人不会把我们都变成电池,但更现实的情况是,与《R.U.R.》不同,人类和机器人已经做好了和谐共处的准备——因为这已经发生了。这是多重性的概念,你更可能和机器人一起工作,而不是被机器人取代。如果你的汽车有自适应巡航控制,你可能已经这样做了,在无聊的高速公路上让机器人驾驶,而复杂的城市道路上,你来驾驶。
这些机器有望改变人类生活的几乎每一个方面,从医疗保健到运输再到工作。它们应该帮助我们开车吗?当然。(不过,它们有时不得不做出杀人的决定,但好处远远大于风险。)他们应该取代护士和警察吗?也许不是——某些工作可能总是需要人情味。
有一点非常清楚:机器已经到了。现在我们必须要找出如何承担发明一个全新物种的责任。
One More Thing:13类真实和想象中的机器人
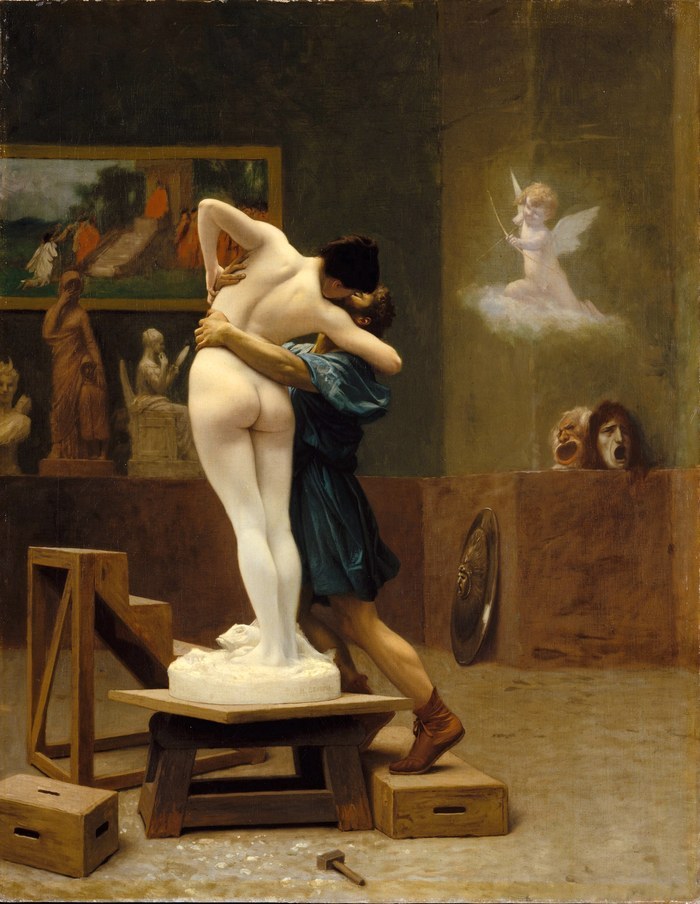
1、皮格马利翁(Pygmalion)(古希腊),这是这一切的开端。在希腊神话中,皮格马利翁用象牙雕刻了一个女性形象,然后发现自己爱上了她。他吻了她,奇怪的是,她感受到了温暖。所以,阿芙罗狄蒂(爱与美的女神)就把雕像变成了一个真正的人类女性,这样皮格马利翁就可以娶她了。从而就产生了一个智能的人形机器。

2、Rossum's Universal Robots( 1921年),卡雷尔·卡佩克1921年的戏剧《Rossum's Universal Robots》将“机器人”一词引入词典,尽管这些人工劳动者是由化学制品而不是金属制成的。它们也比大多数机器人更凶残,对巩固“杀人机器”的比喻有很大的帮助。
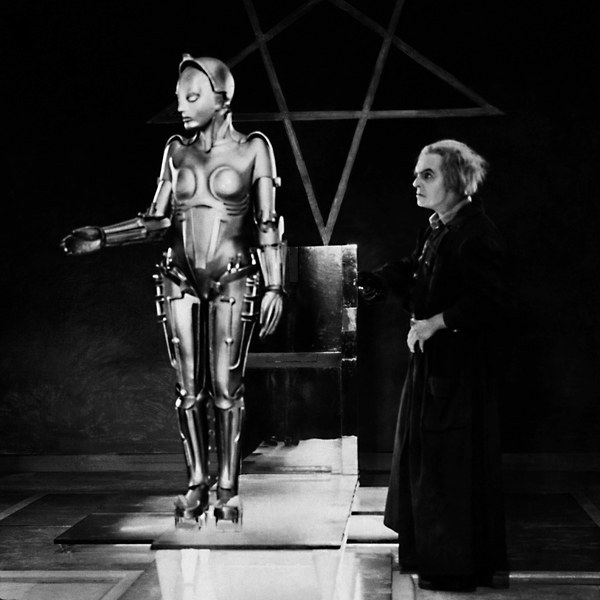
3、Maschinenmensch (1927),无声电影《大都会》(Metropolis)中的人形机器人明星。从技术上讲,它是一个雌核动物,意思是一个雌性机器人。这已经发展成为了一个极其棘手的问题,充斥着各种模仿女性的性感机器。
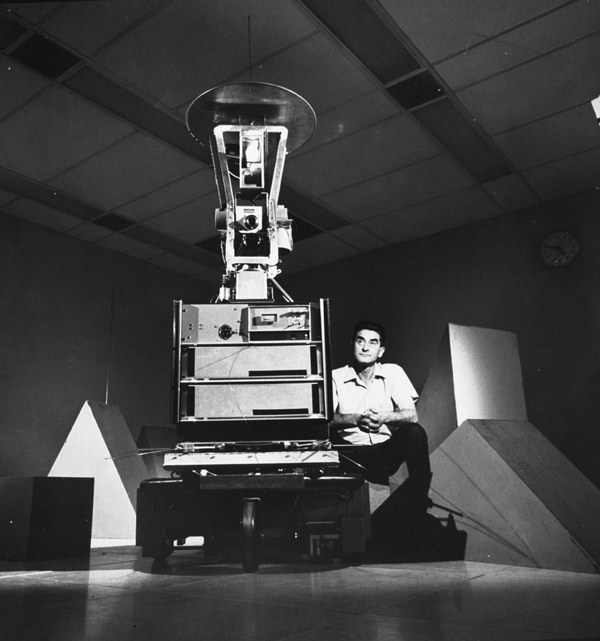
4、Shakey( 1966 ),1966年至1972年间发展起来了一种颤抖机器人,它是第一个真正有感知能力和移动能力的机器人,能够在房间里绕过障碍物。这要归功于早期的计算机视觉技术,这种技术如今可以帮助机器识别图片中的猫,更重要的是,它可以让自动驾驶汽车感知周围的世界。

5、StanfordCart(1960),和Shakey一样,StanfordCart也是一个让机器自主导航的早期实验。它装着四个自行车轮胎到处跑,靠汽车电池供电。一个有趣的事情是:张贴在通往实验室道路上的“小心机器人车”标志,曾多次被人偷走。
6、C-PO和R2-D2 ( 1977 ),有史以来最伟大的机器人二人组。

7、终结者( 1984 ),我需要对终结者缺乏痛苦的说法提出异议。机器人学家实际上希望他们的发明能感受到痛苦,原因和你我需要感受到的一样:痛苦阻止我们伤害自己。终结者能抵挡子弹吗?当然。但它也需要知道,在何时它的身体/电枢会推得很远。

8、火星漫游者(Mars rovers)( 1997年至今),也许是太阳系中最受欢迎的机器人,自从1997年索杰纳号(Sojourner)登陆火星以来,火星漫游者(总共四个)一直在这颗红色星球上漫游。当然,火星车已经变得越来越复杂。如今,上图所示的好奇号(Curiosity)火星车可以自主地找到最好的岩石,用激光进行爆炸。图片中显示的是两个航天器工程师和四个火星车。

9、Asimo ( 2000 ),本田的第一个人形机器人P1,有6英尺2英寸高。 它的后代,现代的 Asimo,身高略超过4英尺,显得更可爱。但这并不是重点。本田正在优化其两条腿走路的机器人,这种技术也许有一天会使它们在探索为人类建造的环境时有用,比如核反应堆。

10、达芬奇手术机器人(daVinci surgical robot)( 2000 ) ,2000年推出的达芬奇手术系统不是外科医生的替代品,而是一种辅助。医生可以遥控操作仪器来完成更精确的手术。不过,这也不是没有坏处的。首先,系统会提高成本。事实证明,医学院的学生正在这个系统中受到可怕的训练。

11、Roomba ( 2002 ),是一个受人喜爱的吸尘器。

12、DARPA挑战的自动驾驶汽车( 2004 ) ,机器人汽车革命始于2004年的DARPA大挑战赛,一场艰苦的穿越沙漠之旅。DARPA是五角大楼的研究部门,它对把人类驾驶员排除在外感兴趣。这项挑战开始了对自动驾驶汽车的研究,但我们离100%自主的机器人还有很长的路要走。

13、波士顿动力公司SpotMini ( 2016 ),波士顿动力公司是少有的不用担心广告的公司之一,它只需要发布机器人做疯狂事情的视频就行了。例如,在一周的时间里,它首先展示了它的SpotMini四足机器人是如何打开一扇门并抓住它让另一个SpotMini溜过去的视频,然后是另一个人试图用曲棍球棒击退机器人视频。
原文链接:
拓展阅读:
新科技快速指南系列之“自动驾驶汽车”:历史、现在与未来

发表评论