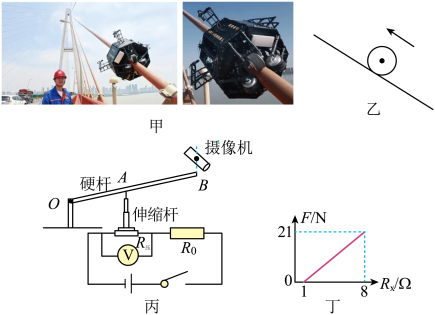
探索者Ⅵ号是一种全新的桥梁拉索检测机器人。图甲是探索者Ⅵ号对白沙洲大桥拉索进行检测时的情景。机器人工作时,将八个轮子紧压在拉索上,利用电动机提供动力,沿着拉索匀速向上爬升。爬升过程中,四台摄像机全方位捕捉拉索表面的情况,内部携带的电磁探伤仪透过表层检测拉索内部钢丝的情况,它们探测的数据都会实时传输到技术人员的电脑中。
(1)当探索者Ⅵ号沿着拉索匀速向上爬升时,请在图中画出轮胎受到的摩擦力的示意图。
(2)探索者Ⅵ号的主体部分使用了低密度高强的碳纤维材料,使得机器人的总质量只有30kg。某次检测的拉索总长为300m,机器人以0.5m/s的速度,从底端匀速爬升至顶端,爬升的竖直高度达到了150m,求机器人克服自身重力做功的功率。
(3)使用摄像机观测拉索时,需要利用伸缩杆来调整摄像机的位置,伸缩杆设置在不同位置时,其承受的压力和可调节的范围都不一样,为了使伸缩杆的位置更加合理,研究人员设计了如图丙所示的检测装置。OAB是可以绕O点转动的杠杆,OB的长度为45cm。质量为0.6kg的摄像机通过竖直硬杆固定在B端,伸缩杆始终竖直作用于A点。在伸缩杆下端,有一个压敏电阻,其电阻大小与所受压力的关系如图丁所示。测试电路中电源电压U额=6V,R0=6Ω,电压表量程0~3V。(不计杠杆、伸缩杆和硬杆的重力)测试时,闭合开关,将伸缩杆固定在某一位置,拉伸或收缩伸缩杆的同时,查看摄像机的调节范围和成像效果;再将伸缩杆固定到另一位置,重复以上操作,直到摄像机调节范围和成像效果满意为止。
①若某次测试时,OA的长度为30cm,求此时伸缩杆对压敏电阻的压力大小;
②为了不损坏测试电路,伸缩杆的作用点A到O点最小距离为多少?

发表评论