本文作为Autonomous Exploration论文阅读系列的导言,主要介绍自主探索问题的基本概念与通行框架。在本系列后续文章中,将忽略共性内容,主要介绍每种方法的个性之处及主要贡献。一、 概述
机器人可通过导航系统自行完成点到点的移动,但其实现高度依赖全局地图。SLAM可以建立全局地图,但需通过手持、遥控、驾驶等方式,手工遍历整个环境。一旦撤掉操作人员,机器人的应用就会受限于导航与SLAM间这种“鸡与蛋”的因果困境。
自主探索(Autonomous Exploration)系统就为解决这类问题而生。借助探索算法,机器人可以自主遍历未知环境,建立完整的地图,全程无需人工的介入。从表现上看,自主探索系统其实是把 SLAM 手工遍历环境的过程自动化了,因此也被归入主动式 SLAM(Active-SLAM)的范畴。
一些能针对局部环境做出快速反应的规划器(如fast-planner)也能在未知环境中实现自主导航,但仍需手动给出目标点waypoints。二、 系统框架
一个完整的,能够直接指导机器人运行的自主探索系统包含三部分:
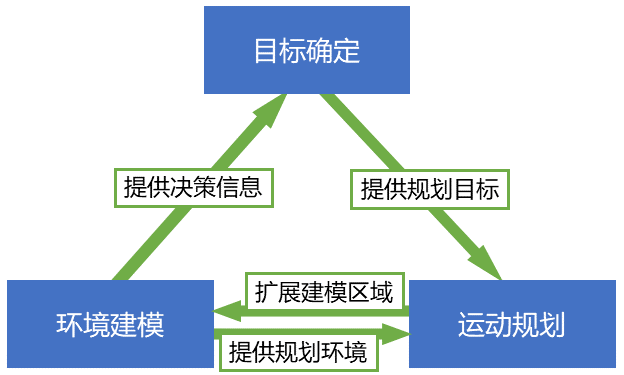
自主探索系统框架1. 目标确定
由系统主动给出,而非人为指定行进目标,是自主探索问题的核心环节。一般而言,环境建模与运动规划方案已被提前选定,对自主探索问题的研究就是对如何确定行进目标,即“下一步要往哪里走”的研究。
大多数的自主探索工作只关注(或主要关注)如何确定行进目标,而不过多研究如何进行运动规划,对环境建模的关注则更少。
2. 运动规划 运动规划(Motion Planning)区别于只给出可行道路的路径规划(Path Planning),它通过优化路径、将路径点与姿态/速度关联等方法,帮助机器人在复杂约束下正确、快速、平稳地执行路径。
许多研究者不仅设计确定目标的方法,还会设计相应的运动规划策略,将两者共同纳入一个探索系统进行研究。一个高效、稳定的自主探索系统,离不开与其目标确定方法、传感器特征、平台运动性能等相适应的运动规划方法。
3. 环境建模
环境建模即环境地图的构建。建模部分的运作则较为独立,与其他环节保持一种松耦合的关系:产出的地图信息作为目标确定、运动规划的依据;机器人的运动则又扩展了地图的覆盖面积。
该环节多依靠已有的 SLAM 系统完成,同一种探索方法经少量修改,可以与多种 SLAM 方案共同使用。也正因此,在评价一个探索系统的优劣时,一般不以建图精度作为衡量指标。
三、 实现策略
绝大多数现代的自主探索方案在确定行进目标时,都基于边界区域(Frontier Region)和最佳视角(NBV, Next Best View)的思想。
边界区域是自主探索问题中的常见概念,指地图中已知区域和位置区域相邻之处。1. 选取行进目标的典型流程
一个自主探索系统选取行进目标的典型流程包括:
(1) 搜索边界区域,并以区域上的点为备选视点(View Points);
(2) 计算备选项的路程代价(Cost of Travel, 前往某点所需路程长度)、信息增益(Information Gain, 某点能观测到的未知区域大小)等指标;
(3) 通过上述指标,计算备选项的综合收益,从中选取综合收益最大的视点,作为机器人下一步的行进目标,力求让机器人经过最短的路程,获取最多的未知区域信息。
这里列举的是Frontier-based方案的选点流程。狭义上讲,NBV方案指那些完全不考虑寻找frontiers,而是在所有已知空间中产生viewpoints,再去比较综合收益的方法;Frontier-based方案则指那些寻找frontier再做比较的方法。而广义上来说,frontier也可以理解为一种NBV方法,只不过viewpoints直接在frontier region中产生。2. 自主探索方案间的区别
不同自主探索方案间的主要区别一般在于:
不同探索系统选取最佳视角的方法花样繁多。除了不同的综合收益计算方法外,还会引入角度差异、时间代价等衡量指标,有时也会对信息增益的计算方法进行重新设计。
除上述四点外,还有为提升系统鲁棒性及探索效率,减少计算开销所做的零散改动。
也有少数论文从不同的角度看待这一问题,如将探索过程看作一个部分可观察的马尔可夫决策过程(POMDP)来处理[Paper],或使用深度学习赋予探索算法空间结构常识等[Paper]。
四、 总结
探索问题一直是SLAM领域一个不温不火的子方向。相关系统自上世纪九十年代发展至今,在多数场景下,已经能够较高质量的完成建图工作,同时形成了一套完整的技术范式。
当前,探索问题的研究内容、研究方法已经明显区别于建图、规划、定位这些传统任务。由于其在无人环境中的显著优势,以及社会对机器人更高自主性的期待,这一问题也将得到持续乃至更多的关注。
(下图所示为TARE planner的室内仿真环境探索过程。相关论文获得了RSS2021 Best Paper Award。)
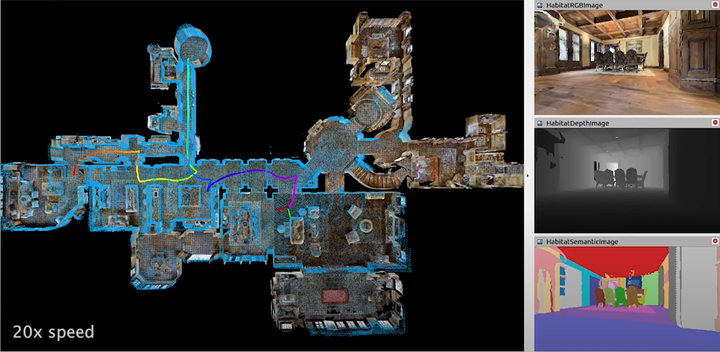
在 Matterport环境中进行探索的TARE

发表评论